拉格朗日方程法建立多自由度振动系统运动方程
一、广义坐标
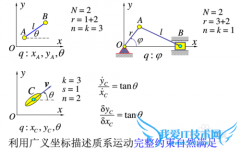
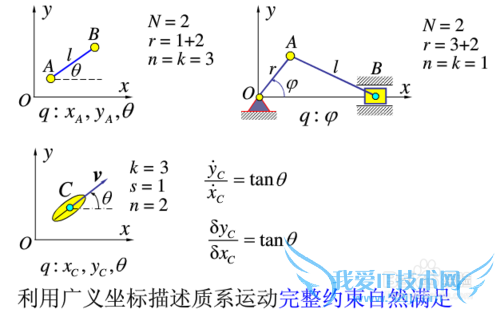
物体的机械运动规律可用不同的坐标系统表示,我们把秒速系统位形所需要的独立参数或独立坐标称为广义坐标,通常用q1,q2,q3,......qn表示,其中n为独立坐标个数。广义坐标具有以下几种性质:
1. 完备性:广义坐标可以确定系统任意时刻的位形和形状;
2. 独立性:同一组广义坐标之间相互独立、是线性无关的,之间互无函数关系;
3. 不唯一性:一个系统的广义坐标是不唯一的,但个数都等于系统自由度数,且都能用来描述系统的振动规律。
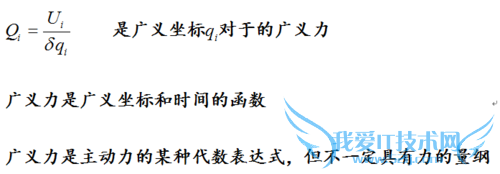
二、广义力
与广义坐标对应的是广义力,广义力是广义上的力,它的量纲有它与广义坐标虚位移的乘积为功的物理量纲决定的,即:若广义坐标为线位移,则广义力就是通常意义上的作用力;若广义坐标为角位移,则广义力就是力矩。
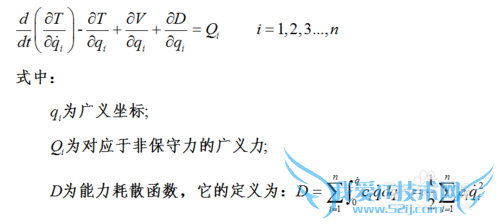
三、拉格朗日方程
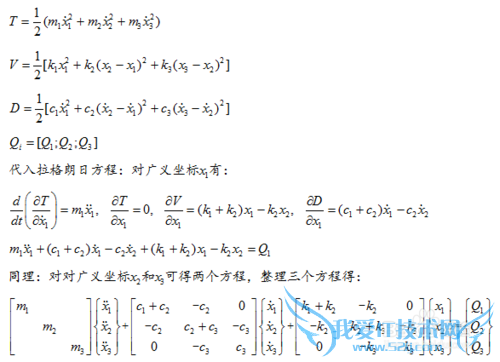
根据拉格朗日理论可知,振动系统的运动方程可以用动能T、势能V和耗散能D表达成下图所示的表达式:
四、拉格朗日方程法的步骤
利用拉格朗日方程建立系统运动偏微分方程,可以避免未知约束反力的出现,简化推导过程,其解题步骤可归纳为:
(1) 首先判断系统的自由度数,并选取适当的广义坐标系;
(2) 以广义坐标和广义速度建立系统的动能T表达式;
(3) 当主动力是保守力,建立用广义坐标表示的只能U的表达式;
(4) 对于有阻尼情况,应该单独考虑阻尼,计算相应广义速度对应的耗散能函数D;
(5) 当有非保守力时,计算广义坐标qi对应的广义力Qi
(6) 将T、V、D和Qi ,代入拉格朗日方程进行运算,即可得到振动系统的运动偏微分方程。
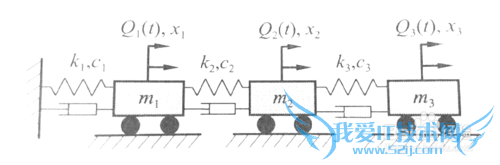
五、算例分析
建立如下图1所示的三自由度质量-阻尼-弹簧振动系统的振动方程。
解:如图所示,建立坐标系,眼水平振动方向选择广义坐标系(x1,x2,x3),则按上节所述步骤,依次求解。求解过程如下图2所示。
用户类似问题:
问题1:已知两个自由度系统的拉氏量,求解运动方程、本征...
你的拉格朗日量确定是对的?计算的数字挺麻烦的,不太整,不过也有可能失我算错了,思路没问题,你最好验算一遍。具体过程如下: >>详细
问题2:拉格朗日方程(第二类)的三个形式,理论力学的,...
拉格朗日方程的一般形式是: 式中T为用各广义坐标qi和广义速度 qi导 表示的系统的动能;Qi为对应qi的广义力.方程式的个数等于系统的自由度N.保守系统中存在势函数V(q1,q2,…,qN;t),则广义力Q=?V/?qi,又因V中不含qi,V/?qi... >>详细
问题3:用拉格朗日力学推导两轮小车运动方程
看分析力学的教材吧 >>详细
问题4:拉格朗日方程适合的力学体系是哪些?有什么特点?...
你好 拉格朗日方法和欧拉方法一般是一起作对比出现的 拉格朗日方法着眼于个别质点运动,所以要求质点能够辨识,一般出流体以外的质点运动都用拉格朗日方法 欧拉方法着眼于一定空间内各个参数的变化,是场方法,一般用于流体研究。 两者具体的定... >>详细
问题5:拉格朗日
约瑟夫・拉格朗日(Joseph-Louis Lagrange,1736~1813)全名为约瑟夫・路易斯・拉格朗日,法国著名数学家、物理学家。1736年1月25日生于意大利都灵,1813年4月10日卒于巴黎。他在数学、力学和天文学三个学科领域中都有历史性的贡献,其中尤以数学方... >>详细
- 评论列表(网友评论仅供网友表达个人看法,并不表明本站同意其观点或证实其描述)
-