欢迎您访问52IJ教育培训网,今天小编为你分享的数学方面的学习知识是通过网络精心收集整理的:“前方交会法_前方交会法计算步骤 详细的 谢谢![数学]”,注意:所整理内容不代表本站观点,如你有补充或疑问请在正文下方的评论处发表。下面是详细内容。
你是指哪方面的?
其他类似问题
问题1:建筑工程测量 前方交会法.一个三角形的图 左下是A 右下是B 上面是P角а为边BA与PA的夹角角β为边AB与PB的夹角已知 坐标: Xa=500.00 Ya=500.00 Xb=526.825 Yb=433.160 观测值:а=90度03分24秒 [数学科目]
-----------------------------------------------------------------
用前方交汇法解:
AB距离=((526.825-500)^2+(433.160-500)^2)^(1/2)=72.022
方位角BA=arctg(500-433.16)/(500-526.825)=111度52分02秒
方位角BP=方位角BA-50度35分23秒=61度16分39秒
方位角AB=方位角BA+180度=291度52分02秒
方位角AP=方位角AB+90度03分24秒
=381度55分26秒
=21度55分26秒
边长BP=AB*SINa/SINP=72.022*SIN90度03分24秒/SIN(90度03分24秒+50度35分23秒)=113.581
同理:边长AP=87.755
增量X=边长BP*COS方位角BP=113.581*COS61度16分39秒=54.583
增量Y=边长BP*SIN方位角BP=113.581*SIN61度16分39秒=99.605
则P((526.825+54.583),(433.160+99.605))=P(581.408,532.765)
复核:
增量X=边长AP*COS方位角AP=87.755*COS21度55分26秒=81.408
增量Y=边长AP*SIN方位角AP=87.755*SIN21度55分26秒=32.765
则P=((500+81.409),(500+32.765))=P(581.408,532.765)
复核正确.
则P(581.408,532.765).
问题2:c#距离计算、角度转换、前方交会、距离交会程序
Program:
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace 测绘工程
{
class Program
{
static void Main(string[] args)
{
string a;
Console.WriteLine("1:距离计算");
Console.WriteLine("2:度、分、秒转换");
Console.WriteLine("3:度与弧度转换");
Console.WriteLine("4:前方交会");
Console.WriteLine("5:距离交会");
Console.WriteLine(" ");
a=Console.ReadLine();
switch (a)
{
case "1"://计算距离
Distance distance = new Distance();
Console.WriteLine("请输入第一个点位坐标:");
distance.X1 = Convert.ToDouble(Console.ReadLine());
distance.Y1 = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个点位坐标:");
distance.X2 = Convert.ToDouble(Console.ReadLine());
distance.Y2 = Convert.ToDouble(Console.ReadLine());
distance.Calcu();
Console.ReadLine();
break;
case "2"://度、分、秒转换
zhuanhuan zhuanhuan = new zhuanhuan();
string b;
Console.WriteLine("1:度转换为分");
Console.WriteLine("2:度转换为秒");
Console.WriteLine("3:分转换为秒");
Console.WriteLine("4:分转换为度");
Console.WriteLine("5:秒转换为度");
Console.WriteLine("6:秒转换为分");
Console.WriteLine(" ");
b = Console.ReadLine();
switch(b)
{
case "1":
Console.WriteLine("度数:");
double dushu=Convert.ToDouble(Console.ReadLine());
zhuanhuan.A(dushu);
Console.WriteLine("转换后度数为:"+"{0:f4}"+"分",dushu);
Console.ReadLine();
break;
case "2":
Console.WriteLine("度数:");
dushu = Convert.ToDouble(Console.ReadLine());
dushu=(zhuanhuan.A(dushu));
dushu = (zhuanhuan.A(dushu));
Console.WriteLine("转换后度数为:" + "{0:f4}" + "秒", dushu);
Console.ReadLine();
break;
case "3":
Console.WriteLine("分:");
dushu = Convert.ToDouble(Console.ReadLine());
zhuanhuan.A(dushu);
Console.WriteLine("转换后度数为:" +"{0:f4}"+ "秒", dushu);
Console.ReadLine();
break;
case "4":
Console.WriteLine("分:");
dushu = Convert.ToDouble(Console.ReadLine());
dushu = (zhuanhuan.B(dushu));
Console.WriteLine("转换后度数为:" + "{0:f4}" + "度", dushu);
Console.ReadLine();
break;
case "5":
Console.WriteLine("秒:");
dushu = Convert.ToDouble(Console.ReadLine());
dushu = (zhuanhuan.B(dushu));
dushu = (zhuanhuan.B(dushu));
Console.WriteLine("转换后度数为:" + "{0:f4}" + "度",dushu);
Console.ReadLine();
break;
case "6":
Console.WriteLine("秒:");
dushu = Convert.ToDouble(Console.ReadLine());
dushu = (zhuanhuan.B(dushu));
Console.WriteLine("转换后度数为:" + "{0:f4}" + "分", dushu);
Console.ReadLine();
break;
}
break;
case "3":
{
string aa;
double bb;
huduzhi huduzhi = new huduzhi();
Console.WriteLine("1:角度制转换为弧度制");
Console.WriteLine("2:弧度制转换为角度制");
Console.WriteLine(" ");
aa = Console.ReadLine();
if (aa == "1")
{
Console.WriteLine("角度为:");
bb =Convert.ToDouble(Console.ReadLine());
bb=huduzhi.A(bb);
Console.WriteLine("弧度为: "+"{0:f4}",bb);
Console.ReadLine();
}
if (aa == "2")
{
Console.WriteLine("弧度为:");
bb = Convert.ToDouble(Console.ReadLine());
bb=huduzhi.B(bb);
Console.WriteLine("角度为: " + "{0:f4}", bb);
Console.ReadLine();
}
break;
}
case "4":
{
jiaohui jiaohui = new jiaohui();
Console.WriteLine("请输入第一个控制点X坐标:");
jiaohui.XA =Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第一个控制点Y坐标:");
jiaohui.YA =Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个控制点X坐标:");
jiaohui.XB =Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个控制点Y坐标:");
jiaohui.YB = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第一个观测方位角(弧度制):");
jiaohui.QBAP = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个观测方位角(弧度制):");
jiaohui.QPBA = Convert.ToDouble(Console.ReadLine());
jiaohui.qianfang();
}
break;
case "5":
{
julijiaohui julijiaohui = new julijiaohui();
Console.WriteLine("请输入第一个控制点X坐标:");
julijiaohui.XA = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第一个控制点Y坐标:");
julijiaohui.YA = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个控制点X坐标:");
julijiaohui.XB = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个控制点Y坐标:");
julijiaohui.YB = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第一个控制点与待求点距离:");
julijiaohui.DAP = Convert.ToDouble(Console.ReadLine());
Console.WriteLine("请输入第二个控制与待求点距离:");
julijiaohui.DBP = Convert.ToDouble(Console.ReadLine());
julijiaohui.juli();
}
break;
}
}
}
}
问题3:用公式法计算,详细步骤和过程
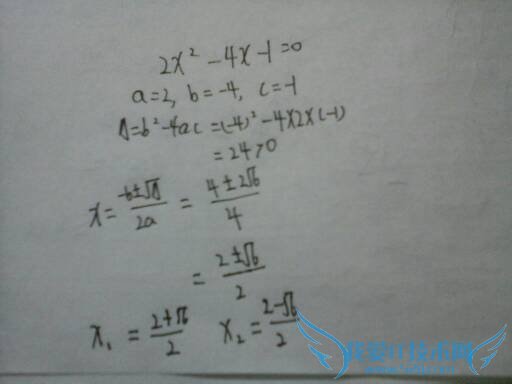
问题4:公式法计算步骤是?[数学科目]
1.Δ=b-4ac
2.-b-√b-4ac
―――――
2a
问题5:公式法计算的步骤是
- 评论列表(网友评论仅供网友表达个人看法,并不表明本站同意其观点或证实其描述)
-